Aldo
Vargas
 Robot
Robot{ designer | programmer | innovator }
loading
RobotI am a roboticist with a PhD in Robotics from the University of Glasgow (UK) and a BEng in Mechatronics Engineering from UNAM (Mexico). I am a robotics hardware and software systems integrator with a strong background in artificial intelligence. I analyze robotic system requirements and define practical plans for problem solving, integration, and deployment, primarily for mobile robots across aerial, ground, and marine domains. I am a persistent solver of complex problems, with a focus on designing systems that perform reliably in the real world.
I am a robotics builder and systems integrator with a strong execution mindset, focused on taking ambiguous, high-complexity technical problems and turning them into reliable, production-ready systems.
Over the last decade within Canada’s robotics startup ecosystem, I have led multidisciplinary teams while remaining deeply hands-on across research, prototyping, systems integration, and validation of autonomy stacks. My work spans controls, motion planning, perception, computer vision, and AI-enabled decision systems, with a consistent emphasis on real-world performance and operational robustness.
Principal Robotics and Autonomy Engineer with deep hands-on experience designing and deploying real-world autonomous systems. Expertise spans multi-sensor perception, state estimation, and real-time control, with a strong track record of building reliable autonomy stacks through simulation-driven development and rigorous validation. Background in applied AI and computer vision, combined with end-to-end systems integration from research and prototyping to scalable, operator-facing products. Technical leader who blends strategic direction with direct execution to deliver complex robotics programs at scale.
Adrenaline junkie. Mechatronics engineer. Motorcycle rider. LEGO enthusiast. Rescue diver. Robot designer, programmer, and innovator.

RailVision - Leading the design and implementation of a fully autonomous train operation (ATO) system by managing a cross-functional engineering team across robotics, simulation, and AI. Driving core architecture decisions in control systems, guidance, navigation, and optimization. Spearheaded the development of the recommendation engine behind EcoRail, a real-time driver-assist platform that provides fuel-efficient throttle and braking guidance to train engineers. The system integrates ROS-based components, autonomous navigation logic, sensor fusion, and remote operation capabilities, with real-time data streamed via cloud infrastructure for large-scale deployment and fleet management. In practice, my role combines technical leadership with direct contribution to research direction, prototype evaluation, system integration, and operational readiness.

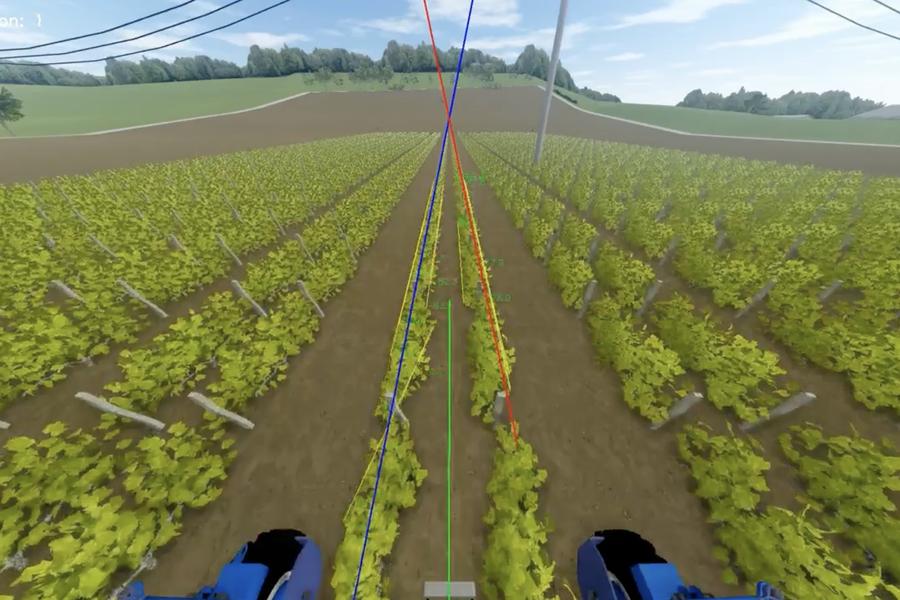
Nexus Robotics - Led the AI and robotics teams, overseeing architecture and development of autonomy, perception, and cloud control systems for autonomous agricultural robots. Directed cross-functional efforts across robotics, computer vision, and targeting systems to optimize weeding performance. Championed remote operations and cloud-integrated management tools to enhance reliability and scalability in real-world deployments. Beyond management, I led technical strategy and frequently drove the initial R&D and prototyping cycle for key autonomy capabilities before scaling implementation across teams.
Nexus Robotics - Managed a team of robotics engineers and contributed to the full-stack development of a full autonomous weeding solution. Led the design of autonomous navigation systems using ROS, with a strong focus on GNC, real-time control, sensor fusion, and targeting systems for precise field operations. Also supported the transition to remote operations and cloud-based fleet management to enable scalable deployment.
Nexus Robotics - Developed key robotics components for an autonomous weeding robot, including ROS-based control stacks, guidance and navigation algorithms, computer vision modules, and sensor fusion pipelines. Supported early-stage testing and cloud control integration, with a focus on system performance, positioning accuracy, and autonomous operation in unstructured environments.

C2RO - Served as a key technical leader in the development of C2RO’s proprietary real-time cloud AI platform, which empowers data-driven businesses to transform physical spaces into intelligent, responsive environments. Led architectural decisions and system-level design across robotics, AI, and cloud computing. Specialized in computer vision, object tracking, and privacy-aware analytics, leveraging deep expertise in SLAM, cloud-to- edge systems, and Kalman filter–based sensor fusion. Managed critical software modules for facial recognition and behavioral analysis, while mentoring staff in the design, deployment, and optimization of autonomous systems.
C2RO - Core member of the R&D team focused on increasing robotic autonomy and enabling multi-robot collaboration through cloud-based computing and AI. Developed robotics software and hardware components using ROS to support real-time autonomous navigation, sensor fusion, and perception pipelines. Contributed to the implementation of cloud-based SLAM (C-SLAM), computer vision modules, and backend systems for distributed robot coordination. Key responsibilities included GNC development, odometry via Kalman filtering, object detection and tracking, and seamless integration of cloud and onboard robotic systems.
Key Contributions:
ALTAX Unmanned Systems Consultancy, is a firm dedicated to share our expertise and knowledge to help Unmanned Systems Business attain their goals and solve problems. In a more general sense, we are individuals with vast knowledge and experience in the Unmanned Systems Industry.
Fully solving problems by designing the Unmanned System from ground up, tailored specifically to the needs of the application to ensure maximum performance while keeping cost low. Applications like: object tracking, realtime object recognition and so forth.
Clients include companies from United Kingdom, Canada, USA, China, Mexico, Israel and Germany.
Developing an Unmanned Aerial System to be able to track pollinators to aid on research for the Department of Plant Sciences at the University of Oxford. Tasks including:
Lecturer, Graduate Teaching Assistant, tutor and demonstrator for several engineering courses at the University of Glasgow for undergraduate and postgraduate students (MsC), including:
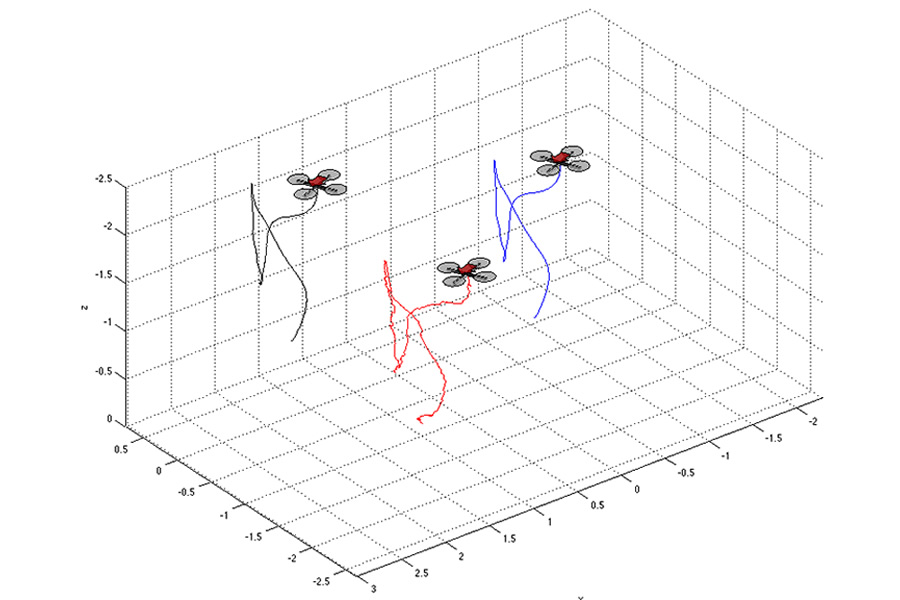
IdF-UNAM. Development of micro UAV’s network for cooperative task’s. Projects done:
Specialist leader on Emergent Technologies for the biggest dairy company in America.
Senior web developer for one of the biggest media company in Mexico City, in charge of building several websites for different radio stations.
Web developer for the General Office of School Administration. Link.
Lead developer and technology consultant for a model hobby company (ViveModelismo), in charge of selecting/testing/repairing Radio Control models (airplanes, helicopters, boats), also managing the IT department of the company.
My educational background from university.
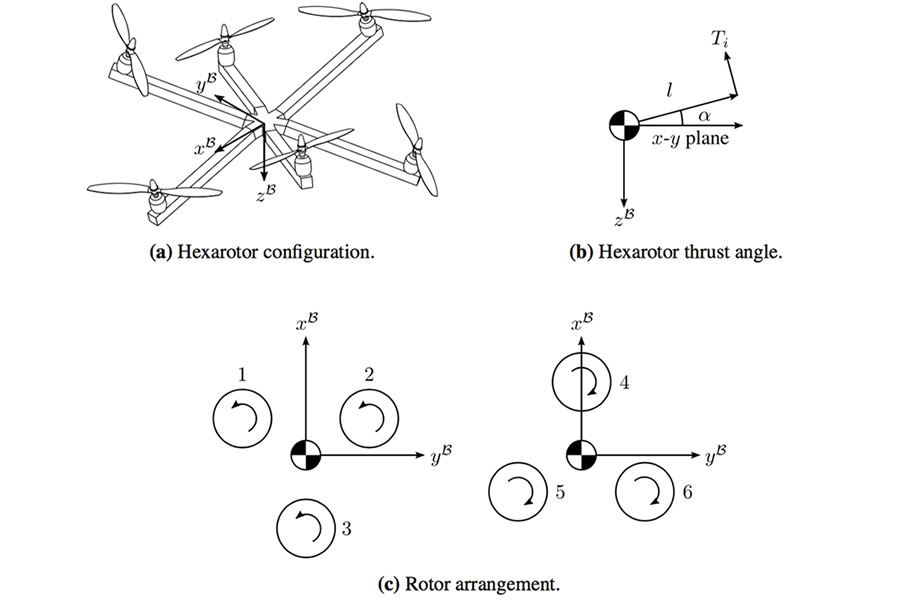
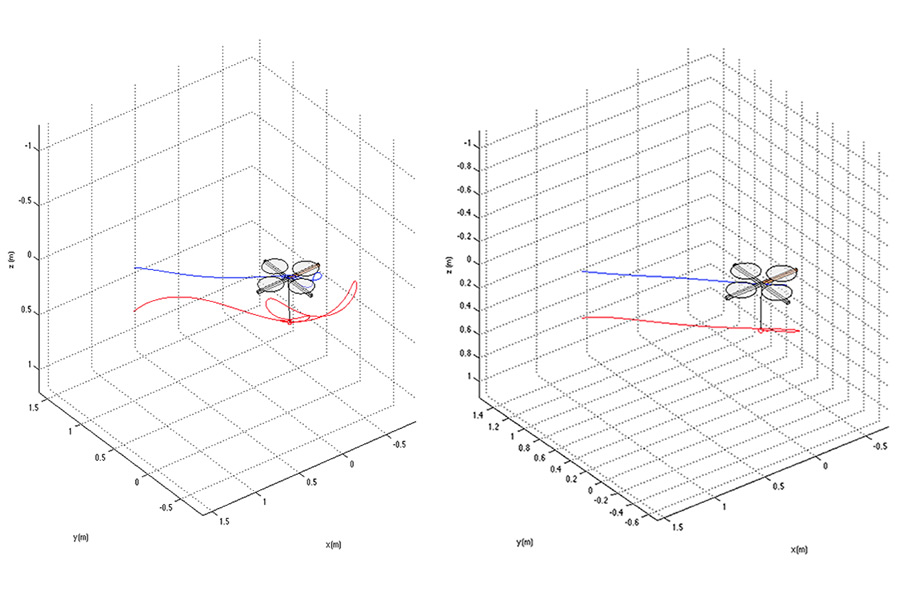
Developing GNC (Guidance, navigation and control) algorithms for Unmanned Systems (Drones).
This course is part of the Management of Technology program at the Berkeley as well as the new Engineering and Business Sustainability Certificate Program. The focus of the course was on innovation process for sustainable products, from product definition to sustainable manufacturing and business models.
The purpose of this interdisciplinary engineering field (Mechatronics) is the study of autonomous systems from an engineering perspective and serves the purposes of controlling advanced hybrid systems.
I am absolutely passionate about simple yet sophisticated technology.
Robotics Systems Integration
Autonomy Middleware
Control & Navigation
State Estimation & Sensor Fusion
Computer Vision & Perception
AI for Robotics
AI Tooling
Python
C
C++
MATLAB
Embedded Platforms
Simulation & Validation
Mission-Critical Systems
Operating Systems
Automation & Tooling
Technical Leadership
Languages
The list of most recent publications (conferences and journals).




List of current Patents/Inventions.
A system and method for performing distributed facial recognition divides processing steps between a user engagement device/robot, having lower processing power, and a remotely located server, having significantly more processing power. Images captured by the user engagement device/robot are processed at the device/robot by applying a first set of image processing steps that includes applying a first face detection. First processed images having at least one detected face is transmitted to the server, whereat a second set of image processing steps are applied to determine a stored user facial image matching the detected face of the first processed image. At least one user property associated to the given matching user facial image is then transmitted to the user engagement device/robot. An interactive action personalized to the user can further be performed at the user engagement device/robot.
To be published
To be published
Hands-on stack used to design, integrate, validate, and deploy autonomous robotic systems in real-world operations.
Languages: Python, C, C++, MATLAB, Bash/Shell, SQL, JavaScript.
Engineering workflow: Linux-first development, Git-based collaboration, reproducible experimentation, and data-driven debugging.
Focus: high-reliability implementation for autonomy, controls, perception, and systems integration.
Middleware: ROS / ROS 2, custom nodes, launch pipelines, telemetry, and diagnostics.
Simulation: Gazebo, RViz, rosbag-based replay and validation workflows.
Autonomy: guidance, navigation, control (GNC), motion planning, localization, and multi-sensor fusion.
Field readiness: systems designed for real operational environments, not only lab demos.
Computer vision: OpenCV-based perception pipelines, object detection/tracking, and real-time visual processing.
Sensor fusion: integration of stereo cameras, LiDAR, IMU, GNSS, and odometry for robust state estimation.
Estimation: Kalman filtering (including EKF/UKF) for localization and control feedback loops.
Applied AI: production-oriented ML integration for autonomous decision support and perception robustness.
Embedded platforms: Raspberry Pi, Arduino, Pixhawk/APM, and custom hardware interfaces.
Integration: end-to-end hardware/software bring-up, sensor calibration, interface validation, and reliability testing.
Platforms supported: aerial, ground, and rail/industrial autonomous systems.
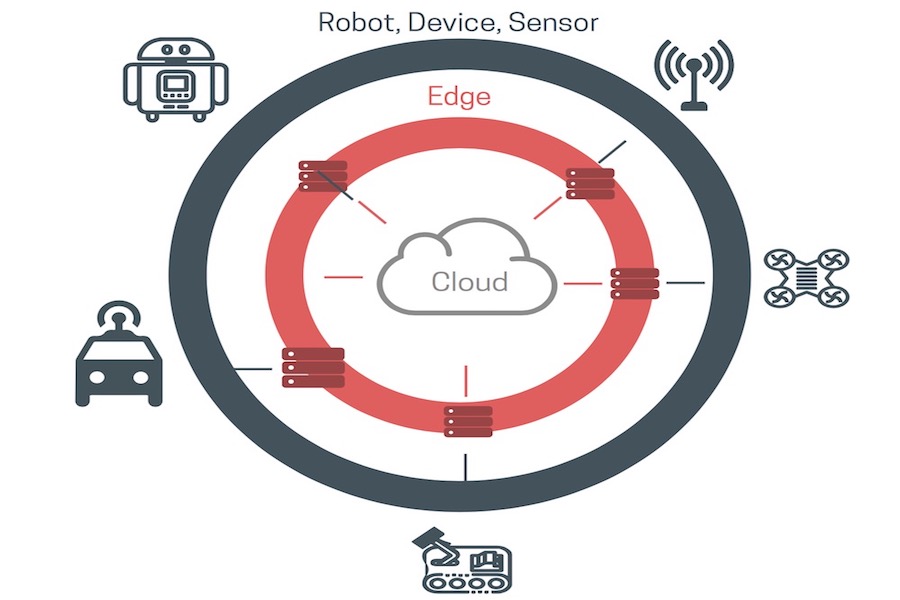
Deployment: edge robotics and cloud-connected architectures for monitoring and remote operations.
Methods: PID, LQR, MPC, fuzzy logic, system identification, and model-based engineering.
Validation: simulation testing, integration testing, hardware-in-the-loop practices, and field trials.
Delivery: from R&D and prototyping to deployable products with measurable operational impact.
Leadership style: lead teams while remaining hands-on in architecture, prototyping, and technical risk resolution.
Get in touch via contact form or email me directly. I will get back to you as soon as possible.
Altax Consulting
Montréal
Canada
Email: aldo@altax.net
Phone: +1 514 929 xxxx


